
COLREGs compliance and collision avoidance with a single vessel on our starboard side seems to be a very simple task. But the situation changes dramatically when the number of the scene participants increases. Bridge watchkeeping is a very situational task: the same places may be nice and quiet one day and absolutely disastrous another day. When it comes to the dense traffic and decision making, do we really understand what are we doing on the bridge and use our RADAR/ARPA equipment or we just follow some sort of our inner voice and try to match the desired CPA? And if we do, we might be really close to a trouble we unaware of. Because to know what we are doing we have to understand the principles of relative motion and radar plotting.
From numerous books and sources available online we can easily find how to build a relative motion triangle and avoid collision with a single vessel. It's a bit more difficult to find a good practical explanation for a multi-vessel case. What is the most important, that since we meet more than one vessel, the variety of different situations grows exponentially.
We might think radar plotting is an outdated skill, and ARPA can help us to solve any situation, but statistics say that the majority of collisions happens due to incorrect assessment of the situation or lack of awareness. After all, ARPA and AIS only give us CPA / TCPA for a present moment, if ships parameters do not change. To make a correct decision in a multi-vessel collision avoidance case one needs to understand the effects of own ship maneuver on other vessels relative motion.
Not only that, but the latest practical assessments of active deck officers by Learnmarine showed that certain stereotypes lead them towards making wrong decisions. Let's review some common situations and mistakes that happen during the simulator training.
Risk underestimation
This happens when we do not take into account several factors:
- ( - ) As per IMO Performance Standards for RADAR Equipment, ARPA CPA error may be as big as 0.3 nm.
- ( - ) When we check the CPA on the AIS, it might be unstable and show different values, depending on the other vessel's sensor errors and motion.
- ( - ) Also, we have to take into account the own vessel dimensions.
- ( - ) Even if the distance between vessels is big we shall always check the TCPA, to understand how fast the situation is developing.
Maneuver is too late or not large enough
When own vessel maneuverability is not taken into account, turns are often being performed not as early as expected. Especially this happens when the vessel reduces the speed first. Speed reduction consequently reduces turning ability and one has to put rudder to larger angles in order to perform turns with the same rate as on faster speed. This is very often omitted.
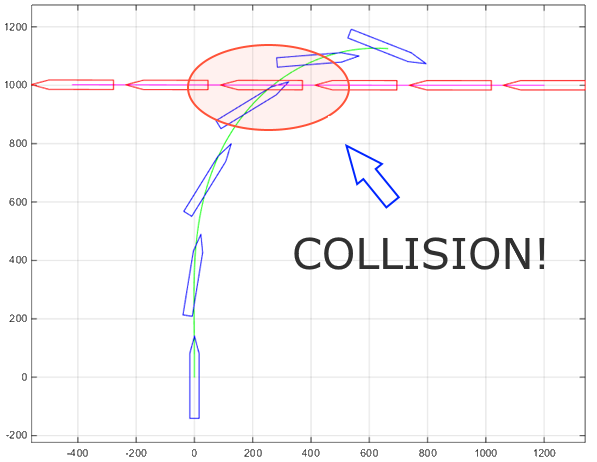
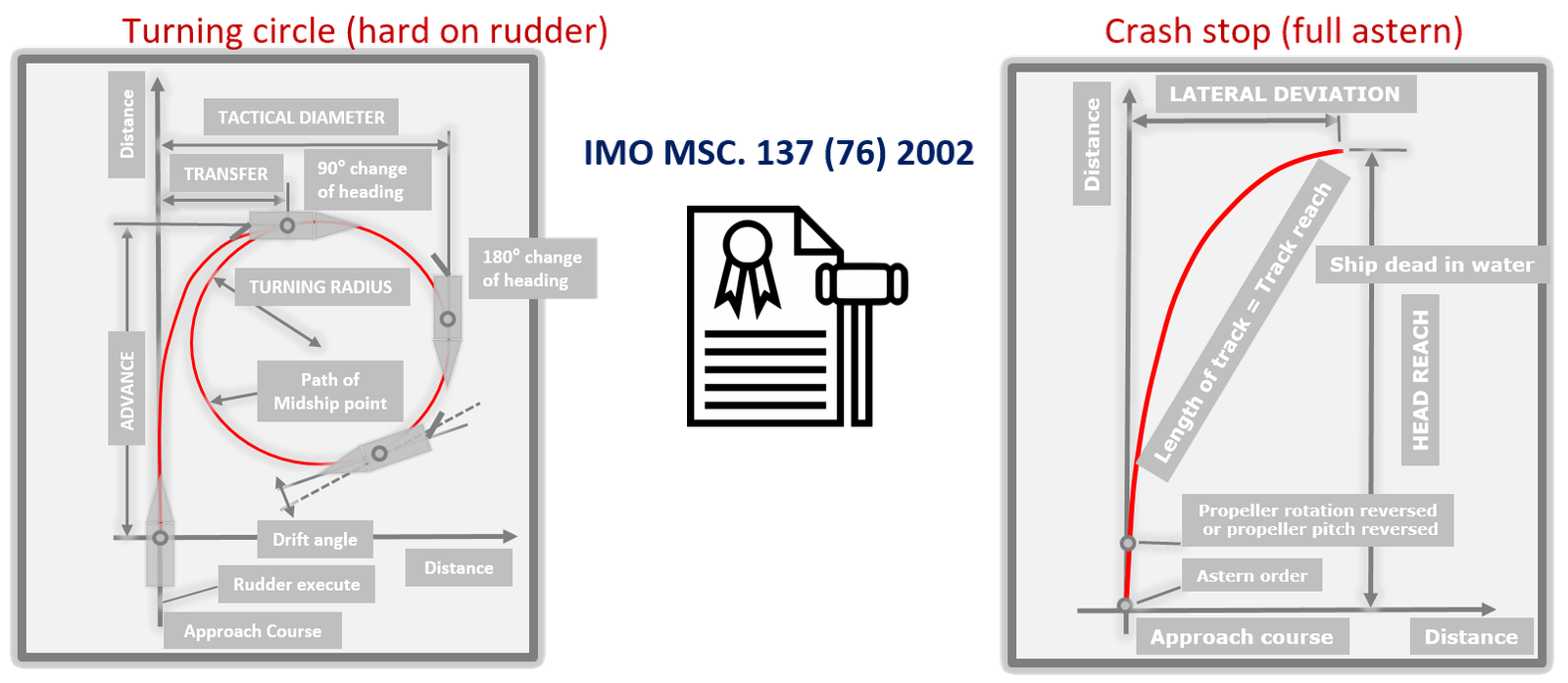
As per IMO MSC. 137 (76) 2002 ship's advance during a turning circle maneuver shall not exceed 4.5 LOA (Length Overall). Which basically means that if we are on a 90 degrees crossing course with another vessel, CPA = 0, and the distance to a rendezvous (collision) point is less than 4.5 LOA, collision is unavoidable. For a 300 m long vessel it is 1350 meters or 0.73 nm.
Relying on autopilot, when quick actions are necessary
Autopilot initially set for the ocean passage, might not react as fast as expected. Bad practice is to set the new course on autopilot and leave it without supervision. While we think that vessel is already turning it could not change the heading at all.
Turn angle and realistic rate of turn shall be taken into account. If you set 20°/min ROT in AP, 40° may take about 3 minutes. Therefore to reach desired CPA one has to start turning at least three minutes in advance.
On the other hand, manual steering provides a faster ship response, but may negatively affect the situational awareness. Once started to steer the vessel manually all watchkeeper's attention is stuck on the helm and the gyro repeater. Therefore before using the helm one shall arrange the helmsman in advance if not available on the bridge.
Doing maneuver for the wrong target
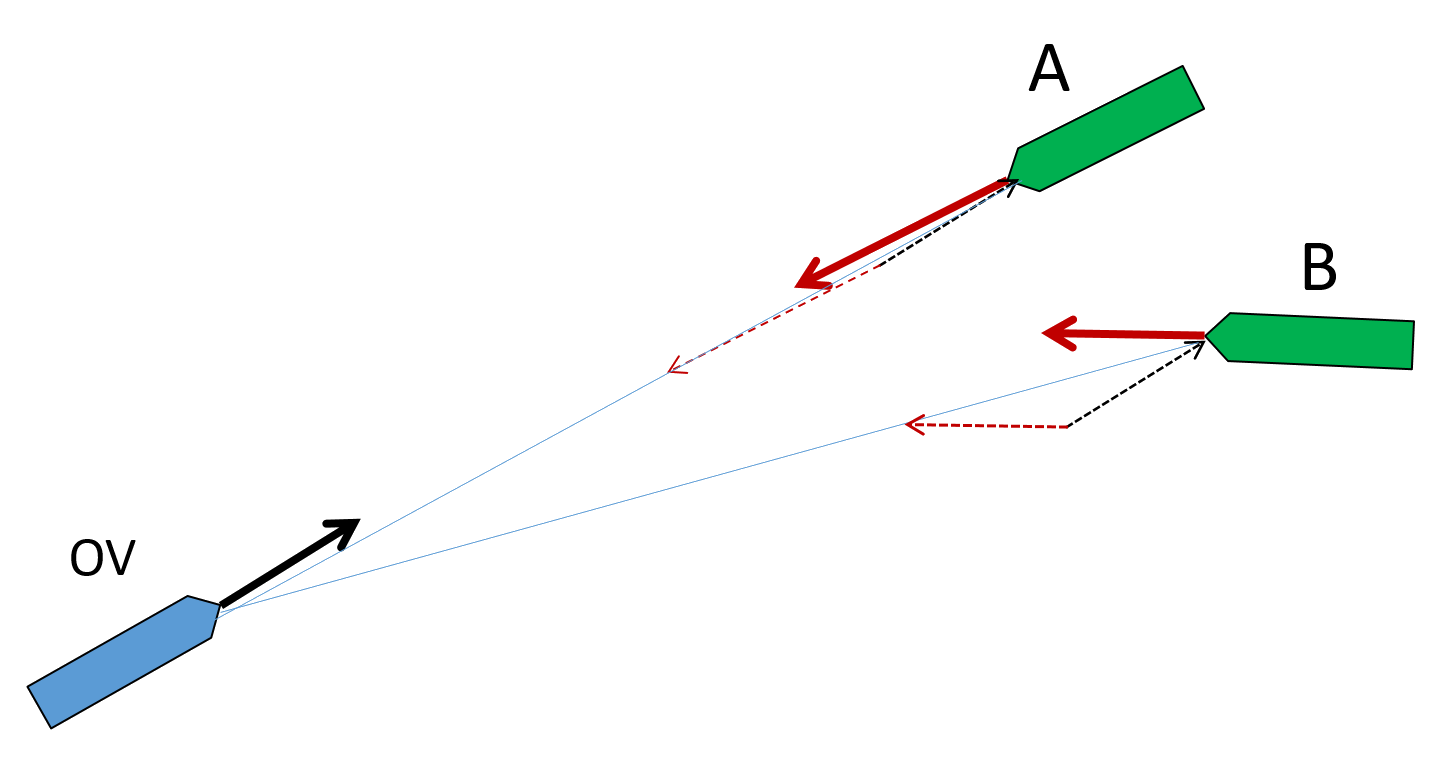
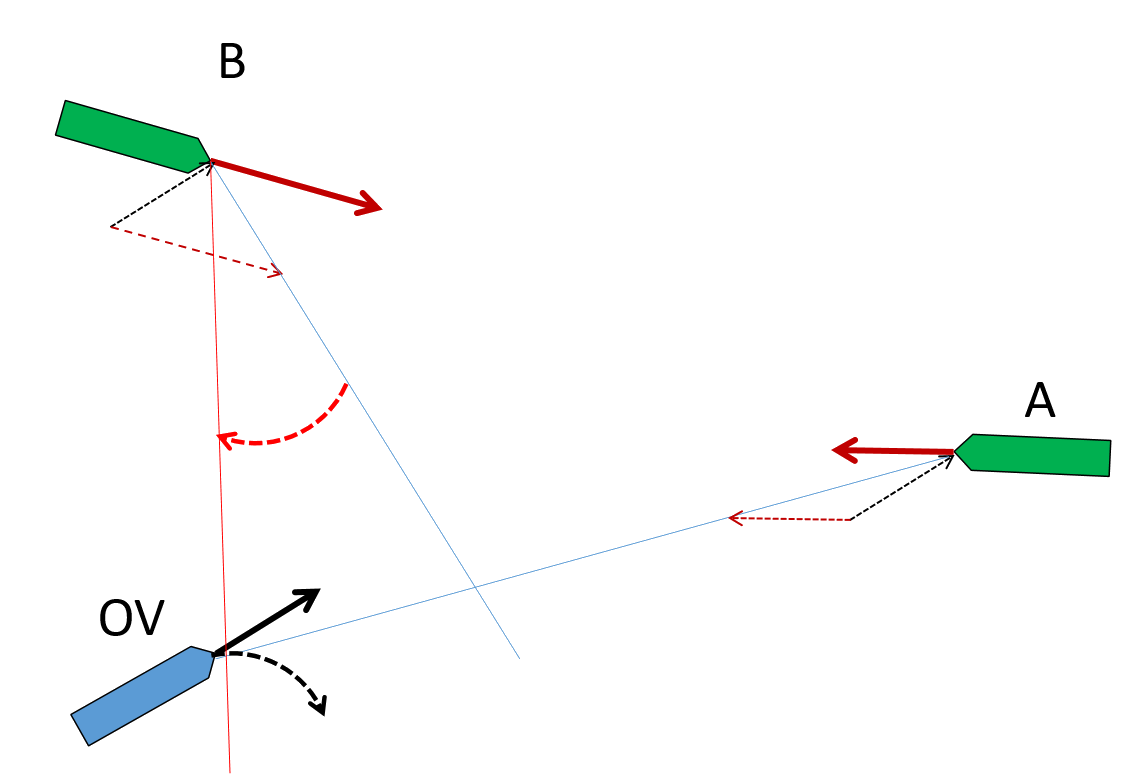
When we have several targets at the scene we have to find out, which targets are limiting our maneuver and which are the most dangerous. In a case shown on the figure below, very often officers start to estimate maneuver for the crossing target B. The trick is if target A will not maneuver, CPA with it will be too small. This happens because the relative speed of approach for target A is much bigger, which calls for a bigger TCPA and consequently bigger course alteration.
Ignoring the speed maneuver
For some reason, a lot of watchkeepers totally disregard the speed maneuver option. However, COLREGs Rule 8 does recommend to use course alteration, if "there is sufficient sea-room available". But the same rule states:
Also takes at least 5-10 minutes to reduce the speed. However, maneuver can be done faster if you reduce from FA to DSA or STOP to bring the vessel to SA Speed.
Another detail to take into account is that the vessel tends to turn slower with less thrust from the propeller. To achieve desirable response watchkeeper might need to use "kick ahead" techniques.
Not checking how maneuver for one vessel will affect another
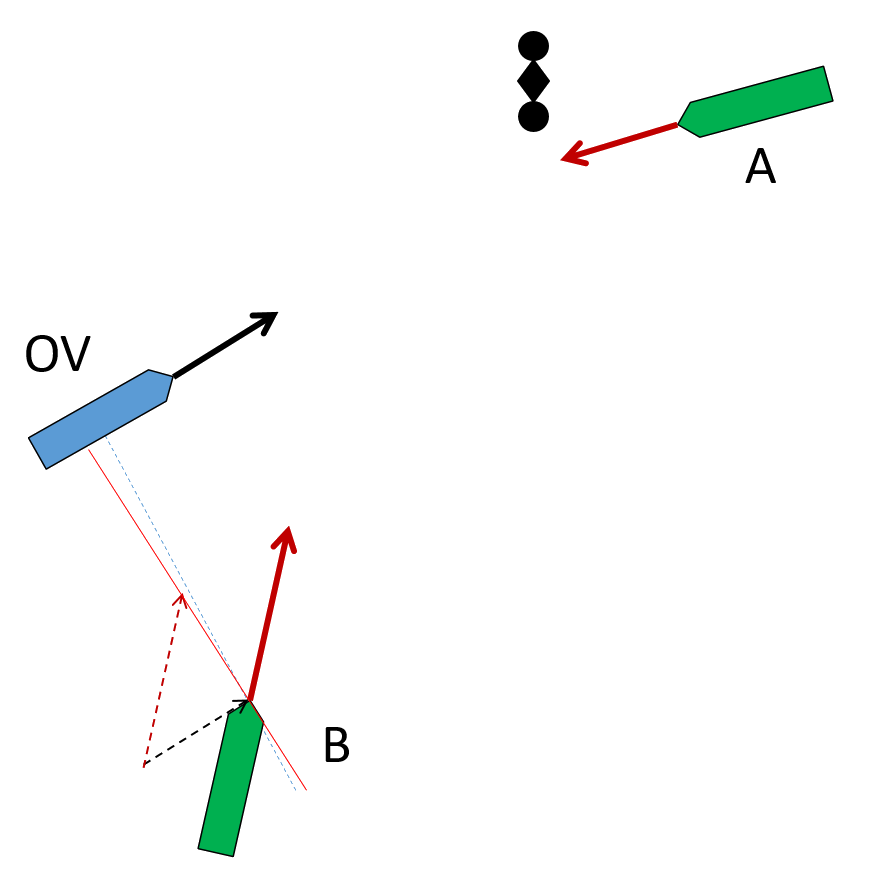
On the picture below, vessel B on the port side is initially may be passing clear and doesn't need to give a way. But the own vessel maneuver to starboard (to give a way for vessel A) might bring it into close-quarters situation when it can't provide the safe distance with own maneuver. This happens because its relative motion line turns clock-wise if we turn to starboard. That's why assessment of limiting targets shall never be neglected.
Doing 2nd maneuver too early, while the first target is not clear
On the picture below a watchkeeper might prefer to reduce speed to give a way to vessel B (which is about 10° behind the beam). However this doesn't improve the situation with the vessel A, which is restricted in maneuverability, it only increases TCPA, but risk of collision remains. Important point is to find the moment when we can start turning to starboard without affecting the CPA with vessel B. The trick is that relative motion line (RML) behind our beam with our staboard turn will turn anti-clockwise, but once the target B gets ahead of our beam RML's behavior changes and it will start turning clock-wise with the Own Vessel turning to starboard.
Summary and conclusions
As was mentioned above just seeing vectors or knowing the CPA doesn't always give you an ability to make the right decision. To be able to find the best solution the navigator has to understand:
(a) How COLREGs shall be applied in different situations; and
(b) Relative motion laws.




Comments